个人简介
孙光辉,工学博士,哈尔滨工业大学教授、博士生导师。研究成果获黑龙江省技术发明一等奖1项、自然科学一等奖1项。长期从事机器视觉、机器人自主导航与鲁棒控制、SLAM建图与定位等相关研究。近3年来前后主持多项军品、民横向课题;申请发明专利近40项,授权20余项,部分成果已经实现转化。出版英文专著一部,发表行业顶级期刊50余篇,Automatica论文4篇,长文高被引论文一篇;IEEE Trans及AIAA系列长文7篇,单篇引用超过130余次,单篇论文最高影响因子7.168。担任科技部项目评审专家、国家重点研发计划地区合作项目评审专家、香港科技创新项目评审专家、中国自动化学会可信控制专业委员会委员、国家自然科学基金委信息学部评审专家等职务。
代表项目
1. 清洁机器人国家重点研发项目: 大场景高精度语义地图协同构建、导航及自主更新
2. 工业产品自动化视觉检测技术与应用
3. 不确定切换系统的滑模控制理论研究
4. 非合作目标感知测量系统
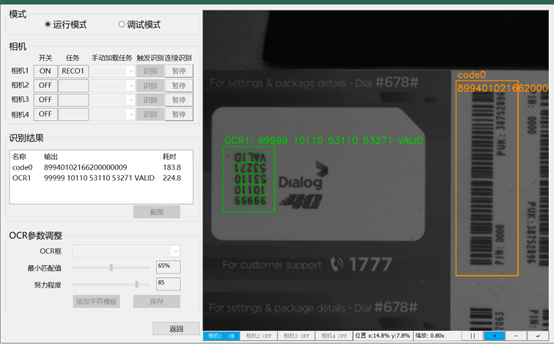
5. 光学芯片/卡片表面信息识别系统


成果转化
1. 与航天五院总体部,合作开发了非合作目标感知测量系统,实现了对空间非合作目标进行准确、鲁棒、实时地跟踪以及估计,并且将跟踪误差降至1 deg/s以下。
2. 与航天五院总体部,合作开发了嵌入式图像处理平台,拥有四核高性能ARM中央处理器以及256核心通用图形处理器,支持多类硬件接口,支持固态存储扩展,实现了大规模高清图像快速采集和处理。
3. 与沈阳派尔泰科科技有限公司,合作开发了芯片/卡片信息识别系统,实现了包括高精精确度光学字符识别、条码/二维码识别、铳线质量检测、物料方向检测等功能。其中字符识别功能要求以字符为单位,误检率不超过0.02%。