楼云江教授
移动操作机器人(Mobile Manipulator):同时具有移动和操作能力的机器人。移动操作机器人面向人机共融环境,整合环境感知与认知,任务及运动规划,操作与控制等领域的研究,基于人类语言指令执行较为复杂的服务任务。
主要研究方向
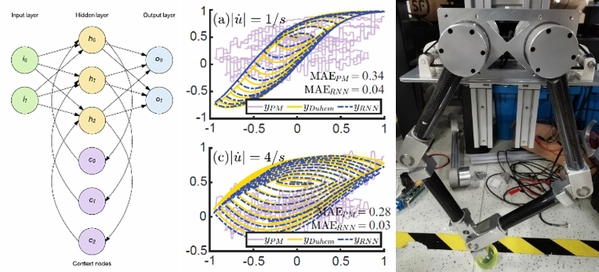
1. 应用于移动操作机器人的智能柔顺关节。仿照人类肌肉生理特征,赋予机器人关节刚柔调节的能力,让机器人自主适应变化的物理交互。针对智能材料带来的非线性磁滞,采用神经网络进行建模,相比传统的磁滞模型对磁滞现象具有更高的预测精度。
2. 密集人群中的行为决策及运动规划。基于行人观测,建立动态流动趋势图模型,预测周围行人轨迹。参考人群移动特性,设计联合行为及规划的多行为导航模块,相比传统的导航模块具有更加类人的导航行为。
3. 移动平台和机械臂协调控制。考虑移动与操作两部分的动力学耦合,设计协调控制器,相比于分散式控制方法具有更好的灵活性,相比于全身控制(whole body control)方法具有更高的计算效率。
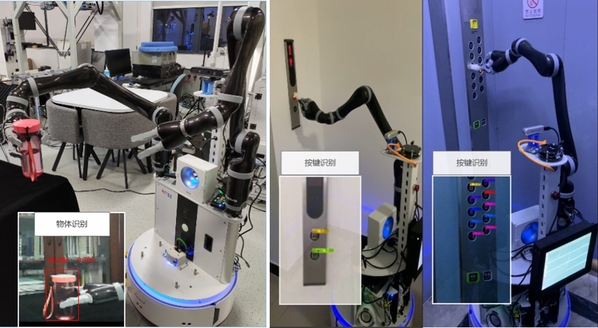
4. 人机共融环境的感知与认知。基于激光雷达,双目相机及惯性测量单元多传感器融合,感知并识别环境中物体的语义信息,空间坐标及机器人操作方式。