
个人简介
姜力,教授,博士生导师,现任哈尔滨工业大学机器人研究所副所长,研究方向是生机电一体化智能假肢和机器人灵巧操作技术。提出智能假肢手的欠驱动机构设计、神经交互控制和生机电集成方法,主持研制我国第一代具有多种感知功能的智能假肢手及其双向生机交互系统,实现肢残患者应用。主持研制微型六维力/力矩传感器和三维力触觉传感器,提出基于人机智能融合和交叉耦合策略的多指手自主控制方法,在传感和控制方面取得的成果集成于达到国际领先水平的HIT/DLR手系统。获国家技术发明二等奖2项和省部级科技奖励6项,发表论文200多篇,出版学术专著3部,授权和申请国家发明专利50项。
代表项目
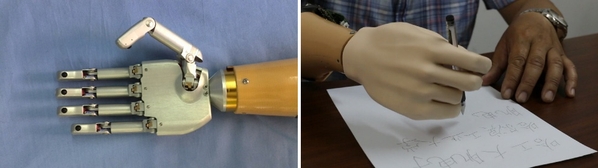
在生机电一体化智能假肢方面,主持完成国家973计划课题“操作感知一体化灵巧假肢设计制造与性能评估”和在研国家重点研发计划项目“具有双向神经通路的智能上肢假肢”等。以再造人手操作感知功能为目标,研制具有触觉/力/位置等感知功能、基于欠驱动机构且机电感控高度集成的智能假肢手,基于多源生物信号实现多自由度假肢多运动模式的控制,基于机电刺激方式实现假肢多种状态的感觉神经反馈,进行肢残患者临床应用。
成果转化
在智能假肢方面,自2009年起与国内最大的上肢假肢生产企业—丹阳假肢厂有限公司合作,共同承担国家863计划重点项目课题、国家973计划课题和国家重点研发计划项目,合作开展多自由度智能假肢手的研发、产品化和应用工作。目前,研发的智能假肢手已经实现患者应用,提升了我国假肢生产企业的研发水平。